近日,厦门大学张宇教授团队在Cell旗下物质科学期刊《Cell Reports Physical Science》发表题为“Bioinspired hydrogel jellyfish with mechanical flexibility and acoustic transparency”的研究论文。该论文报道了仿生水凝胶水母(HABH jellyfish)的相关研究成果,为研发新型仿生水凝胶机器人提供了重要参考。
传统水下机器人一般由刚性结构和材料制成,其声阻抗与水不匹配,是强的声散射体。同时,这些''硬''机器人运动灵活性不高,难以动态应对复杂多变的海洋环境。研究人员发现,声透明(acoustic transparency)作为一种有效的伪装方法,广泛存在于自然界的海洋动物中。例如水母、深海乌贼等拥有高含水量的组织,与水的声阻抗完全匹配,难以被声呐探测。
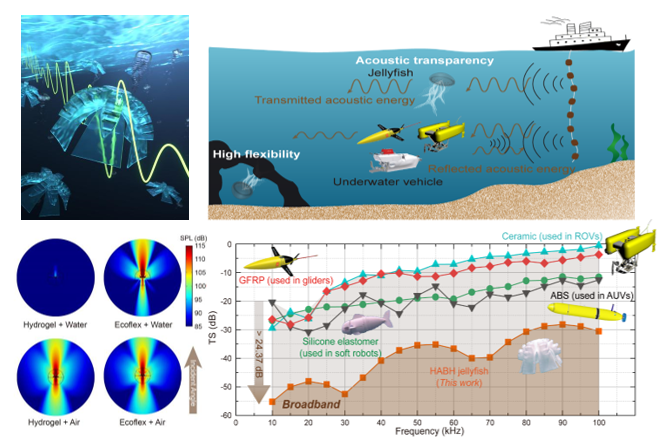
厦门大学张宇教授与美国麻省理工学院方绚莱教授(现就职于香港大学)合作研制了一种液压驱动的仿生水凝胶水母(HABH jellyfish),突破了传统水下机器人易被声学探测和材料刚性的限制。在该水母中,由水和亲水聚合物网络组成的水凝胶具有接近水的密度和声速,能够实现与水近乎完美匹配的声阻抗,在声透明器件设计方面具有巨大潜力。
研究团队比较了水凝胶水母和其他常见水下机器人模型的目标强度(TS),包括由有机硅弹性体(Ecoflex)制成的软体机器人、缆控水下机器人(ROV)、 自主式水下机器人(AUV) 和 水下滑翔机(Glider)等。结果表明,水凝胶水母的后向散射声能减少到约1/270,在10kHz至1MHz的声探测下实现了全向、宽带的声透明。此外,水凝胶水母在液压控制下可以收缩到原来的1/3体长,穿过狭窄孔道,运动灵活。该工作为研发下一代机械柔性和声透明的仿生水凝胶机器人提供了重要参考。声透明能够让机器人实现声伪装或隐身,使其融于背景噪声中,从而具有不易被探测的运动优势。此外,柔性机器人机械灵活、也能承受深海高压。
目前,仿生水凝胶机器人的研究还处于早期阶段,未来仍需要解决很多基础性问题,例如如何集成柔性控制-隐身材料-光声通讯的复合功能单元、如何实现声-光-力-电等多物理场的可编程智能调控等等。尽管面临以上挑战,相信仿生水凝胶机器人在海洋、生物医学等领域的智能感知方面有着巨大的应用前景。
【团队介绍】
张宇教授领衔的厦门大学海洋仿生声学与技术实验室(Marine Bioinspired Acoustics and Technology Laboratory) 长期致力于生物声学机理、声学功能材料、仿生技术与应用研究。该论文第一完成单位为厦门大学海洋与地球学院,第一作者为厦门大学博士研究生张金虎,通讯作者为张宇教授和美国麻省理工学院方绚莱教授(现就职于香港大学)。该研究工作获得国家自然科学基金项目(12074323、42106181)、福建省科技重大专项(2021NZ033016)、面向2035年广东省海洋产业发展战略研究项目(2021-GD-2)等联合资助。
【论文来源】
Jinhu Zhang, Tianye Zhang, Erqian Dong, Chuang Zhang, Zhonglu Lin, Zhongchang Song, Hongquan Li, Nicholas X. Fang*, and Yu Zhang* (2022). Bioinspired hydrogel jellyfish with mechanical flexibility and acoustic transparency. Cell Reports Physical Science, 101081.
【论文链接】https://www.cell.com/cell-reports-physical-science/fulltext/S2666-3864(22)00375-7
(海洋与地球学院投稿)

